

WARA Robotics
WARA Robotics gives researchers and industry partners access to physical and digital test environments for industrial automation research. The arena supports the development and evaluation of robotics solutions for tasks such as kitting, assembly, and lab automation, using a physical robotics lab at ABB in Västerås and a digital simulation environment connected to real industrial challenges.
Objective
The objective of WARA Robotics is to make it easier to test robotics technologies in environments that resemble real industrial use. This helps researchers identify practical challenges early, improve their methods, and move results closer to application.
Research areas and tasks
WARA Robotics supports research in areas such as reinforcement learning, automated reasoning, perception, human-robot interaction, and assembly with dual-arm robots.
Examples include sim-to-real transfer, task and motion planning, object recognition, multimodal perception, learning from demonstration, and dual-arm assembly.
WARA Robotics supports research in three industrially relevant tasks: kitting, assembly, and lab automation. Kitting involves collecting and delivering the material needed for assembly, which requires navigation, perception, object detection, and pick-and-place capabilities. Assembly focuses on putting parts together and requires contact-rich manipulation. Lab automation explores how robotics can improve or create processes in medical, chemical, and analytical labs.
Research environments and partners
WARA Robotics brings together industrial partners, including ABB, Ericsson, and Algoryx, with researchers from several WASP-affiliated universities. The arena is built around two research environments: a physical testbed at ABB in Västerås and a digital simulation environment that can serve as a counterpart to the physical lab.
WARA Robotics offers access to a physical robotics lab, a digital simulation environment, industrially relevant research tasks, and technical interfaces that make it easier to develop, test, and compare robotics solutions. The arena is open to academic and industrial researchers who want to work with flexible automation in realistic settings.
See the robots in action
The three tasks, kitting, assembly, and lab automation, exhibit a wide range of research challenges crucial for further developing flexible automation. Robots not only have to operate in complex environments, but they also need to collaborate with their human counterparts safely and effectively. See the following video for some examples.
Our labs
The physical lab is located at ABB Corporate Research Center in Västerås. It has an open layout that enables experiments with mobile robots and industrial automation tasks.
Physical lab
The physical lab is located at ABB Corporate Research Center in Västerås. It has an open layout that enables experiments with mobile robots and industrial automation tasks.

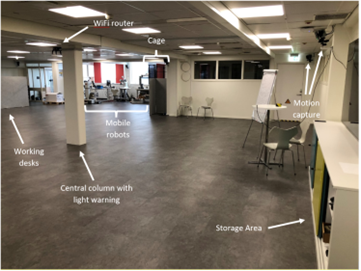
The lab includes collaborative robots, an industrial robot arm, and a mobile research platform based on ABB’s YuMi dual-arm robot. Together, these systems support experiments in flexible automation, mobile manipulation, and human-robot collaboration.

Digital lab
The digital lab is a simulated version of the physical lab, where researchers can develop and test robotics applications before moving to physical robots. It supports Gazebo with ROS 2, as well as AGX Dynamics with Unreal Engine, including a high-fidelity model of the mobile lab environment and mYuMi.


Interfaces and integration
The lab supports several interfaces for communication and programming, including RAPID, Robot Web Services, Externally Guided Motion, ROS 2 Humble, and Python. ROS 2 drivers are available to simplify integration and make it easier to switch between robots.
Join the community
Academic and industrial researchers, as well as PhD students in Sweden, are welcome to contact WARA Robotics to discuss research ideas, possible use of the arena, or opportunities to join the community.