

NEST-project PerCorSo

Project Name: PerCorSo- Perceiving and Communicating Correct-by-design Socially Acceptable Autonomous Systems
Principal/ co-Principal Investigators: Iolanda Leite, Jana Tumova and co-PIs Prof. Joakim Gustafsson, Prof. Patric Jensfelt.
Industrial Partners: ABB AB, Saab AB
Autonomous robots of all kinds have been increasingly finding their way to our daily lives: think of autonomous vehicles, delivery drones, as well as service robots deployed in the healthcare domain. Not only are they complex, regarding the technology they embed, but also regarding the tasks they must complete and requirements they must meet.
How can we make sure they are safe? How can we improve the way humans perceive their safety? How can we make sure that people will accept them, and how can we improve their usability? How can we enhance trust in them?
This project aims to design the most appropriate way for a robot to behave in different human-crowded environments. Its novelty lies in integrating understanding of spatial and social context, multi-modal communication, and autonomousmotion strategies to advance real-world social robots.
Impact and Possible Applications
The long-term impact of PerCorSo on society, industry, and academia includes the design and deployment of collaborative, coworking and coexisting robots that perceive, plan, act and communicate as desired by humans.
The project aims to enable novel types of robot applications in our society and will impact the accessibility of service and comfort, e.g., allowing round-the-clock help for elderly care, or autonomous driving with higher levels of autonomy. It will also improve the quality of operations in risky conditions (e.g., search and rescue and exploration of disaster sites). It will also allow safe human-robot coworking: while robots can take care of tedious, heavy tasks, humans can contribute with tasks that are difficult to handle by robots such as fine manipulation or handling of rare situations.
Scientific presentation
As autonomous robots move from constrained environments into the social world in the form of self-driving vehicles, service, delivery, and search-and-rescue robots, their interaction with and around people becomes inevitable. Therefore, not only guarantees on their performance are crucial, but social acceptability also becomes a key requirement: they must be provably safe, but also perceived as safe.
A key observation in addressing this challenge is that in real-world scenarios, the human and the robot influence each other bi-directionally: the behaviour of the robot impacts the human behaviour either intentionally (e.g., by issuing advice, such as voice commands) or unintentionally by simply co-acting in the same space. This loop calls for more accurate models of human behaviour and context to improve the real-time system performance and increase social acceptability in the long-term.
Purpose
PerCorSo will be focusing on promotiong trust in autonomous robots. Trust, when viewed as a human feature, has a strong connection to social acceptability. At the same time, trust can be viewed as verifiability; having proof that a system works as expected makes it trustworthy to its designers and stakeholders.
The project is expected to enhance trust in autonomous robots in both these senses, supported by the spectrum of robotic capabilities: from perception, through planning and acting, to communicating. In addition, the expected results should have the potential to disrupt industries where the use of mobile service robots alongside humans is becoming increasingly more common, especially after the COVID pandemic.
Methods and approach
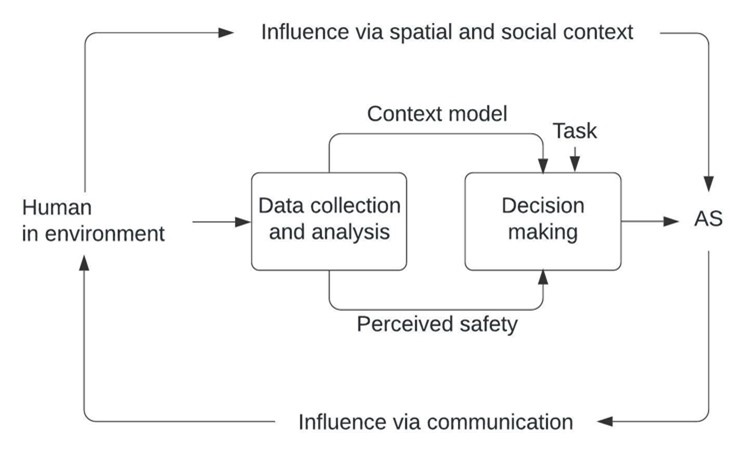
The approach is illustrated in the figure and involves addressing the following research challenges:
1) building data-driven models of patial and social context and socially acceptable behaviour and interaction, in order to accommodate implicit and explicit communication as a factor influencing social acceptability
2) studying the alignment of rigorous behaviour specifications (e.g., safety as a collision avoidance of safe distance keeping) with perception of the robot’s behaviour and interaction with a user e.g., perceived safety
3) designing decision-making and multimodal communication strategies ensuring task completion and promoting social acceptability as optimization criteria
4) validating the proposed methodology in autonomous robots for human-centered environments, starting in a lab setting and scaling up to real-world.
NEST environment description
PerCorSo brings together complementary expertise represented by four PIs: semantic mapping and robot system integration (Jensfelt), formal methods-based decision-making (Tumova), social robotics (Leite), and multimodal communication (Gustafson).
The research team plan to create a local WASP hotspot with the Intelligence Augmentation Lab at its heart. This lab will be built as a shared facility between the two divisions (Robotics, Perception and Learning and Speech, Music and Hearing) involved in this project. The primary focus here has been on social aspects. With PerCorSo, the added value is growing the purpose of the lab to a full-blown system that perceives and acts with a purpose.
Furthermore, the ambition is to establish PerCorSo as the hotspot for research activities enabling functioning and socially acceptable autonomy at the same time.